
Una piattaforma di soluzioni robotiche per l’industria del futuro
AutomationWare punta sulla robotica collaborativa, passando dai nuovi giunti robotici, software, attuatori elettrici fino al cobot AW-Tube che verrà lanciato sul mercato per la fine del 2020. La parola d’ordine è sicurezza: i cobot devono poter lavorare in modo sicuro con l’umano, ed è per questo che AutomationWare insieme alle parti meccaniche offre software di diagnostica per i giunti e di controllo degli attuatori robotici.
di Tommaso Albrile
A partire dal 2010 la richiesta di robot industriali ha avuto una consistente accelerazione, che è andata sempre più crescendo, molte PMI contribuiscono a questa escalation con un aumento consistente di installazioni robotiche. AutomationWare ha accettato la sfida realizzando AW-Tube, robot collaborativo, che sarà presente sul mercato per fine 2020. Sfruttando le competenze meccatroniche, l’azienda è entrata nel mercato della robotica e non ha perso tempo: attualmente il reparto R&D è focalizzato sulla progettazione e realizzazione di attuatori elettrici, che sono il core business della compagnia, e AW-Tube è costituito da sei o più di questi attuatori.

L’AW-Tube consente di unire le capacità dell’uomo e del robot, assistendo e agevolando l’operatore nelle mansioni all’interno dello stesso spazio di lavoro. Il risultato della collaborazione è un aumento della qualità, della produttività e della flessibilità del processo; conseguentemente rendendo più remunerativo per l’azienda.
Una piattaforma modulare per soluzioni di robotica
AutomationWare, partendo dall’ascolto attivo dei propri clienti e delle loro esigenze, sta sviluppando una piattaforma di soluzioni robotiche modulari in base all’applicazione, flessibili, interconnesse, sicure, tecnologicamente avanzate ma semplici da usare. La maggior parte dei robot collaborativi presenti oggi sul mercato sono prodotti finiti che vengono scelti in base al payload. Il contesto economico-culturale dell’industria attuale prevede di valorizzare l’essere umano attribuendogli mansioni che permettano di sfruttare le sue capacità di reazione, capacità di analisi, adattamento e flessibilità. Un ambiente di lavoro collaborativo consente quindi di unire le capacità dell’uomo e del robot, assistendo e agevolando l’operatore nelle mansioni all’interno dello stesso spazio di lavoro. Il risultato della collaborazione è un aumento della qualità, della produttività e della flessibilità del processo; conseguentemente rendendolo più remunerativo per l’azienda.
I cobot per poter lavorare fianco a fianco con le persone devono soddisfare elevati requisiti di sicurezza, devono essere in grado di percepire delle forze esterne ed essere in grado di fermarsi tempestivamente nel caso di urto o contatto. Un requisito fondamentale per le applicazioni collaborative è infatti quello di non generare lesioni alle persone nello spazio di lavoro collaborativo in caso di urto accidentale; un impatto può infatti provocare solamente dolore all’operatore. Per soddisfare queste richieste sono caratterizzati da una struttura leggera con rivestimento esterno in materiali appositi come alluminio e plastica, forme arrotondate per diffondere su una superficie maggiore una forza di contatto e ridurre così la pressione applicata; inoltre, sono dotati di una complessa interconnessione fra elettronica, software e sensori per la gestione della sicurezza.

Giunti robotici per alte velocità
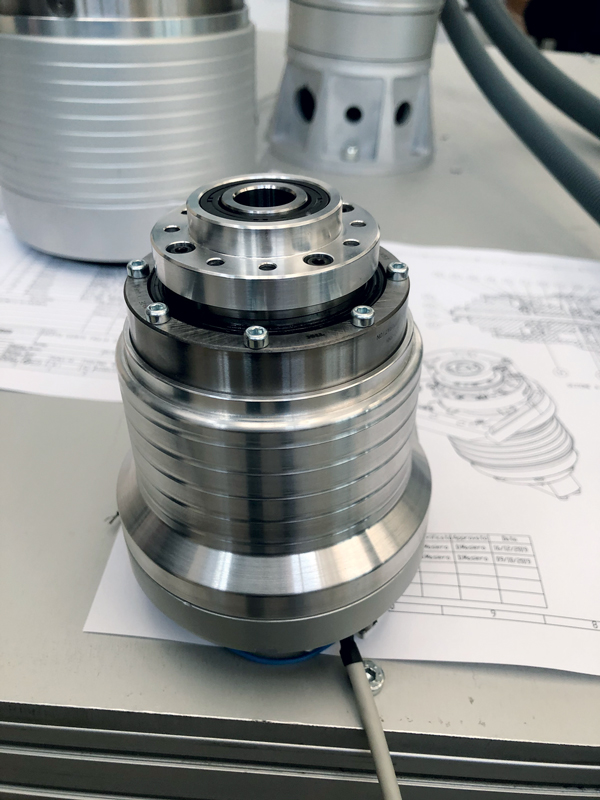
AW-Tube è costituito da sei giunti serie J-Acturator, interamente progettati e realizzati da AutomationWare. Nell’ottica di una famiglia di cobot modulari, ne sono state progettate cinque diverse taglie che si differenziano tra loro per le prestazioni offerte, e quindi anche per peso e ingombri. Sono utilizzabili in una grande varietà di applicazioni, in particolare su sistemi o macchine rotative, laddove vengono richieste prestazioni di coppia su spazi molto contenuti e/o controllo diagnostico estremamente sofisticato.
L’ultimo nato, il J-32 è un giunto estremamente performante. Basato su un motore torque a elevate prestazioni, sviluppa una coppia massima di 353 Nm e nominale di 220 Nm grazie a un riduttore HD ad alte prestazioni. J-14, uno dei giunti più piccoli al mondo, consente la rotazione ad alta velocità pur mantenendo la coppia massima di 28 Nm. Nelle applicazioni di robotica collaborativa la velocità non è un elemento chiave, per ovvie ragioni di sicurezza; uno degli aspetti prioritari è rappresentato dai valori di coppia ottenibili in uscita dal giunto per poter movimentare elevati carichi. Le richieste di elevata coppia e di velocità estremamente ridotta in uscita dal giunto rendono ideale l’uso di riduttori armonici.
I J-Acturator integrano al loro interno motore sincrono a magneti permanenti ad albero cavo, harmonic drive, encoder assoluto multigiro di tipo magnetico montato sull’albero veloce del sistema e un freno di stazionamento come richiesto dalle normative di sicurezza per le fasi di emergency stop e di protective stop. Nel giunto è presente inoltre un’elettronica di controllo in grado di comunicare attraverso il bus EtherCAT con il motion controller del robot basato sul sistema operativo robotico ROS; integra inoltre sensori e accelerometri per la gestione della sicurezza delle operazioni collaborative del manipolatore.
Sistema di diagnostica per controlli in real-time
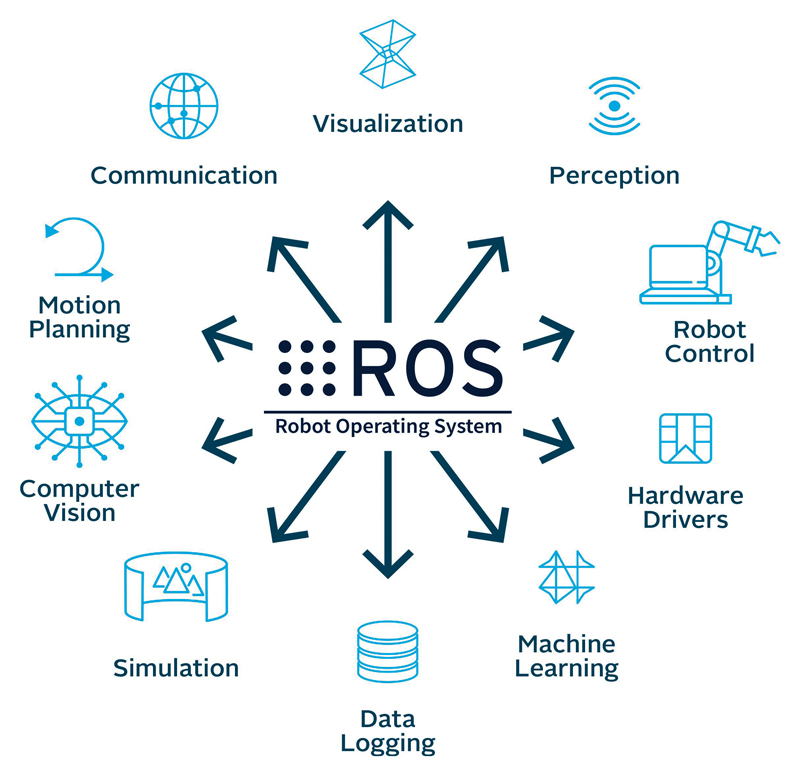
Sui giunti sono stati fatti test vibrazionali, test di reperibilità di movimenti e test di carico. Per i test vibrazionali è stato utilizzato il sistema di diagnostica AwareVu brevettato da AutomationWare per offrire il controllo in tempo reale del giunto. Per la realizzazione del cobot, in particolare l’implementazione del progetto meccanico al suo interno, gli aspetti di cinematica e di pianificazione del moto del robot è stato utilizzato il sistema operativo robotico ROS, un framework open-source molto flessibile. Fornisce librerie e tool per creare software per applicazioni robotiche ROS con linguaggi di programmazione supportati C++, Phyton e Java. I pregi di questo sistema operativo robotico sono principalmente due: l’architettura del software e la generalità nei confronti dello specifico modello del robot.
Altro grande vantaggio di ROS per lo sviluppatore è dato dall’indipendenza tra lo specifico modello di robot e l’utilizzo degli strumenti e algoritmi a sua disposizione. Il modello del robot viene descritto in formato URDF (Unified Robot Description Format) contenente sia le specifiche in termini geometrici e grafici sia cinematici e dinamici e viene utilizzato all’interno del framework per lo studio della cinematica diretta e inversa, per la visualizzazione, la simulazione e la gestione del robot fisico. Un altro elemento molto importante è dato dalle librerie ROS-Control che permettono di interfacciare la parte software con l’hardware fisico del robot. Implementano il Real-Time e permettono il pieno controllo del robot reale sfruttando interamente le potenzialità offerte da tutto il framework di ROS.
Software per collegamenti semplificati
La piattaforma MoveIt incorpora algoritmi di motion planning, cinematica, controllo, rilevamento 3D e manipolazione e permette di costruire il framework necessario alla realizzazione e gestione dei movimenti del robot. L’interfaccia RoboVu è un software di collegamento all’azionamento per controllare l’attuatore da Robot Operating System, una applicazione Linux progettata e brevettata da AutomationWare. RoboVu, rende semplice il collegamento da applicazioni ROS di movimentazione virtuali al bus EtherCat.
Il gestore del robot può pianificare i movimenti in area virtuale, e grazie all’applicazione RoboVu può trasferirli al bus di campo per muovere in tempo reale gli attuatori collegati. RoboVu, semplifica il controllo del robot in condizioni di gestione wireless; per esempio: braccio robotico montato su (AVG) navetta di movimento, o applicazioni che richiedono un collegamento semplificato del cobot con il PC centrale.
Tutte le funzionalità di sicurezza verranno installate sul braccio robotico AW-Tube migliorando notevolmente il livello di sicurezza dell’intero sistema (SafeVu PLC). AW-Tube di AutomationWare sarà in grado di offrire ai propri clienti un cobot modulare customizzabile in termini di spazio di lavoro e di payload, con conseguente ottimizzazione energetica e relativo risparmio economico.