Generare e simulare il percorso della stampa 3D
Eureka Additive è una soluzione innovativa sviluppata da Roboris per l’Additive Manufacturing. La combinazione dello slicing e dei percorsi a 5 assi permette di evitare la stampa di supporti e previene le collisioni sul pezzo.
Da oltre 15 anni Roboris sviluppa Eureka Virtual Machining, una suite di programmi software per la verifica e l’ottimizzazione dei programmi NC e per la simulazione e programmazione dei robot industriali. Roboris è un’azienda italiana con sede a Ospedaletto, in provincia di Pisa, fondata nel 2001 da Mirko Sgarbi e Gianluca Bioli. In origine dedicata allo sviluppo di complessi post processor per Pro/Engineer e Catia, nel 2003 l’azienda sviluppa la prima versione di un applicativo per simulare e programmare robot antropomorfi. Nel 2005 decide di dedicarsi completamente alla simulazione delle macchine utensili a controllo numerico e alla simulazione e programmazione off-line dei robot. Il software commercializzato e supportato da Roboris è completamente sviluppato internamente, nessuna libreria di terze parti viene utilizzata. Questo consente personalizzazioni spinte ad ogni livello, quando necessario. La strategia commerciale è basata sulle vendite dirette e su partnership con produttori/rivenditori di software CAD/CAM, costruttori di macchine utensili ed OEM.
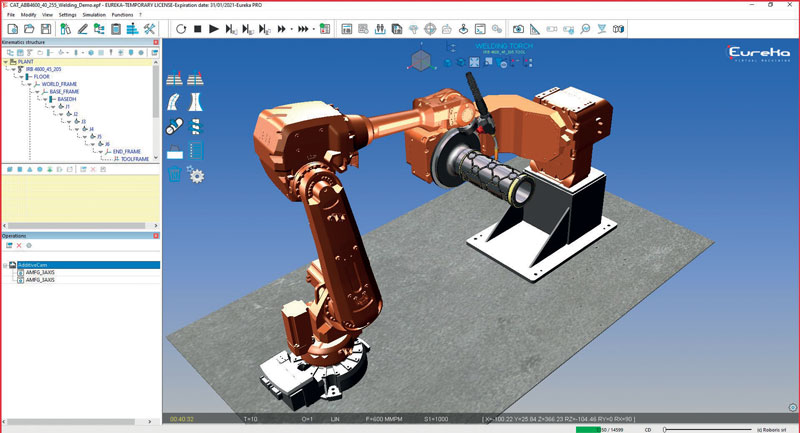
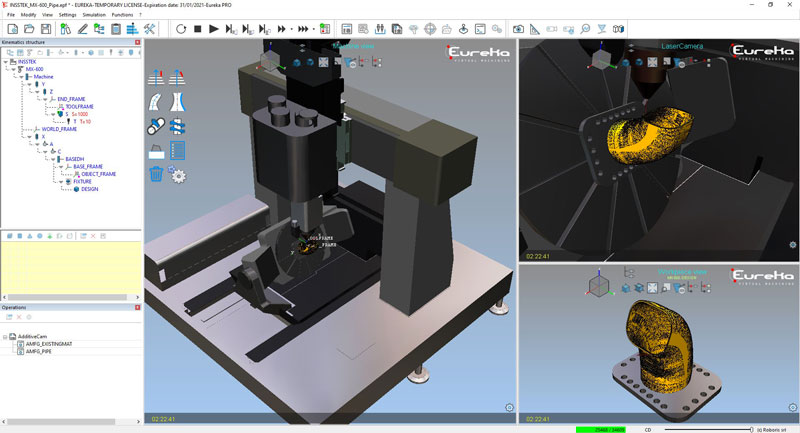
Creazione di percorsi di stampa 3D per robot industriali con posizionatore con Eureka Additive integrato in Eureka Robot. 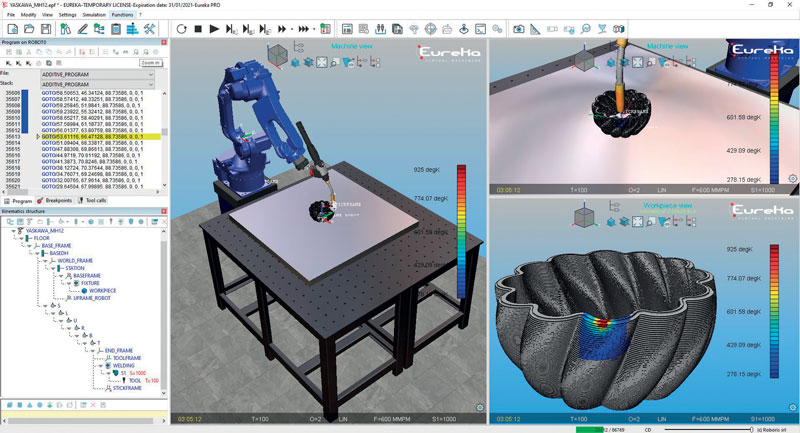
Esempio di simulazione termica.
Il percorso generato può essere definito da diverse strategie a 5 assi
Recentemente, Roboris ha sviluppato un prodotto per il settore dell’Additive Manufacturing, denominato Eureka Additive, uno slicer avanzato rivolto ai processi di stampa con deposizione di materiale diretta (Direct Material Deposition).
Partendo da un modello CAD dell’oggetto da realizzare, Eureka Additive è in grado di generare un percorso di fabbricazione a strati. “A differenza dei più comuni slicer commerciali per stampanti 3D, che riescono a sezionare la geometria solo con piani paralleli alla base di stampa, in Eureka Additive il percorso generato può essere definito da diverse strategie a 5 assi, in cui la direzione di deposizione può essere qualsiasi e le sezioni non esclusivamente planari”, spiega Giovanni Opimitti, Direttore Commerciale di Roboris. “Combinando l’utilizzo di queste strategie con macchine CNC a 5 assi o robot industriali a 6 o più assi, è possibile realizzare parti complesse senza la deposizione di materiale di supporto”.

Esempio di lavorazione 3+2 assi e schema di slicing. 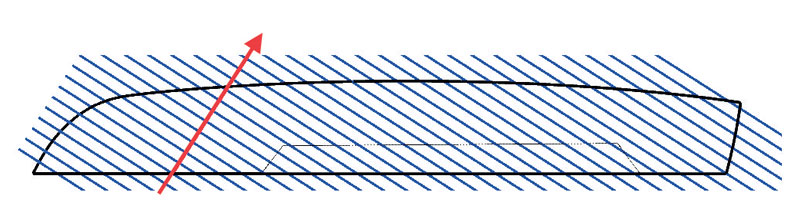
Esempio di lavorazione 3+2 assi e schema di slicing.
Creazione percorsi, simulazione e post-processing
Il percorso generato da Eureka Additive viene tradotto nel programma della macchina utensile o robot tramite un post processor esterno o tramite Eureka Robot. Con Eureka Robot è possibile programmare e simulare macchine utensili o robot antropomorfi (inclusi eventuali assi esterni), emulando anche la deposizione del materiale e l’andamento della temperatura dei processi Direct Energy Deposition (DED) nonché verificando eventuali problemi di collisione, di fine-corsa degli assi o di singolarità. Eureka Robot è in grado inoltre di importare percorsi di additive generati da slicer tradizionali o da sistemi CAD/CAM più sofisticati in grado di generare anche lavorazioni ibride. Eureka Additive è una soluzione disponibile sia come plug-in di Eureka Robot che come plug-in di Rhinoceros, affiancando le potenzialità dello slicer agli strumenti di un software CAD.

Strategie di slicing
Eureka Additive consente di creare una sequenza di operazioni di additive, ciascuna con una propria strategia e una diversa configurazione di parametri.
La strategia 3+2 assi, ad esempio, seziona una geometria target con piani normali a una con direzione di slicing qualsiasi. Nella strategia Pipe, invece, la direzione di slicing è definita da una curva di riferimento e può cambiare continuamente. Nella strategia Cilindrica lo slicing è realizzato con superfici cilindriche coassiali di raggio crescente o decrescente. La deposizione avviene sia in direzione radiale che verso l’asse. La strategia di Rivoluzione a 5 assi esegue il campionamento di un profilo di rivoluzione, avendo la possibilità quindi di realizzare superfici inclinate fino a 90° senza l’utilizzo di supporti. La Coclea Parametrica, infine, è una strategia parametrica in cui inserendo alcuni parametri di configurazione è possibile creare una coclea su albero cilindrico.