
Inail studia i cobot e lo spazio collaborativo
Le applicazioni robotiche collaborative sono implementate mediante un robot progettato per realizzare delle attività in stretta collaborazione con l’uomo all’interno di un determinato spazio detto “collaborativo”. Quali sono le caratteristiche di questo spazio? Inail ha approfondito le norme da seguire per garantire la piena sicurezza degli operatori e, in occasione del Maker Faire di Roma, realizzato un sistema robotico dimostrativo allo scopo di coinvolgere i visitatori nell’individuazione dello spazio collaborativo e della postazione dell’operatore.
Le applicazioni robotiche “tradizionali”, largamente diffuse in alcuni contesti industriali, negli ultimi decenni si sono evolute nelle applicazioni robotiche cosiddette “collaborative” caratterizzate da un’estrema versatilità ed efficacia nel supportare gli operatori. Quest’ultima tipologia comporta l’adozione di misure di sicurezza differenti da quelle tradizionalmente adottate che devono essere efficaci per ogni uso previsto dal sistema robotico stesso. Di fatto, un cobot è un robot progettato per realizzare delle attività in stretta collaborazione con l’uomo all’interno di un determinato spazio detto “collaborativo”, ovvero, secondo la UNI EN ISO 102118- 2.2011, norma tecnica armonizzata di riferimento per questi sistemi, “lo spazio di lavoro dove robot e uomo possono svolgere attività simultaneamente durante le operazioni di produzione”.
Svolgendo delle attività simultaneamente, alcuni spazi del sistema devono essere idoneamente progettati per prevedere la presenza ed il movimento contemporanei dell’uomo e del robot, o di alcuni dei suoi elementi, in modo che non possano esserci rischi per la sicurezza e la salute. Il nuovo progetto di norma elaborato nel comitato di normazione ISO specifica infatti che all’interno dello spazio collaborativo operatore e uomo possono collaborare, co-esistere e lavorare definendo diversi scenari di interazione.
La Direttiva Macchine 2006/42/CE è tutt’oggi la direttiva di prodotto di riferimento per robot e cobot. La robotica però pone nuove sfide in termini di sicurezza dei prodotti. Tali macchine infatti lavorano a compiti definiti e in ambienti strutturati, ma ciò non toglie che possano imparare a svolgere azioni nuove in tale contesto e diventare più autonome. La Direttiva 2006/42/CE presenta una serie di lacune in merito che devono essere colmate. Anche per questo motivo il 29 giugno 2023 è stato pubblicato in GUUE il Regolamento Macchine 2023/1230, che fornisce requisiti di salute e sicurezza aggiornati che tengono conto del forte progresso tecnologico registrato negli ultimi anni.
In particolare il Regolamento si sofferma sui rischi derivanti dal contatto con elementi mobili e da tensioni psichiche evidenziando, al punto 3.1.7, che possono essere causate dall’interazione con la macchina e che le misure adottate devono essere adeguate in relazione a: a) coesistenza uomo-macchina in uno spazio
condiviso in assenza di collaborazione diretta; b) interazione uomo-macchina.
Le principali norme di riferimento di queste macchine, attualmente in fase di revisione, non risolvono alcune criticità della valutazione dei rischi che il fabbricante deve sviluppare. Questa valutazione infatti risulta complessa anche per l’elevata flessibilità e configurabilità di questi sistemi, nonché per l’esigenza di rispondere, in un futuro ormai prossimo, al suddetto requisito. Garantire la sicurezza di un sistema multifattoriale in cui l’uomo e il robot non sono più separati da ripari, ma coesistono e collaborano in uno spazio condiviso, significa in primis realizzare un sistema che non arrechi danno all’operatore in ogni possibile scenario. Sensori di coppia e di velocità, telecamere, laser scanner sono alcuni dei possibili sensori che possono essere adottati e che, attraverso algoritmi, determinano il comportamento del robot ed influenzano l’interazione.
Gli spazi secondo la normativa tecnica
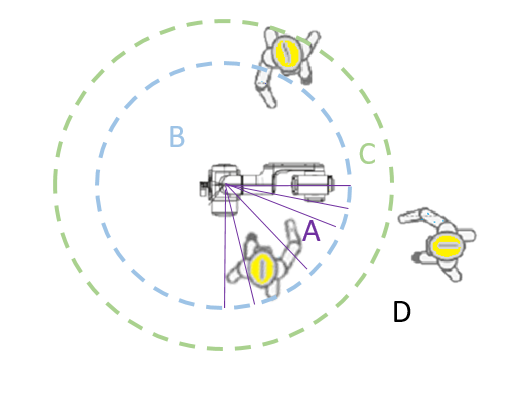
B spazio operativo, in cui anche l’operatore può muoversi
C spazio compreso tra lo spazio massimo e lo spazio operativo, pertanto non raggiungibile dal robot nella specifica applicazione
D spazio al di fuori dello spazio massimo
La normativa tecnica a riguardo codifica gli spazi in cui il robot può operare e/o muoversi che sono caratterizzati da diversi rischi e pertanto progettati con misure di tutela differenti. La norma UNI EN ISO 10218 attualmente in vigore definisce lo spazio massimo come il volume tridimensionale nel quale possono muoversi le parti mobili del robot, l’end-effector ed il materiale lavorato. Per robot dotati di piattaforme mobili (semoventi o a spinta manuale), questo spazio va inteso come il massimo volume che può teoricamente essere raggiunto prevedendo uno spostamento della piattaforma. Tale definizione è stata riconfermata e meglio esplicitata nei lavori della nuova norma.
Lo spazio ristretto è la porzione di spazio in cui il robot si può muovere ristretto da dispositivi di limitazione, ad esempio per i robot mobili questo volume può essere delimitato da marcatori sul pavimento o sui muri, o mediante software che realizzano una mappa interna. Lo spazio operazionale è la porzione dello spazio ristretto che è effettivamente utilizzato mentre il robot esegue tutte le movimentazioni previste dal programma di attività. Lo spazio operazionale può cambiare di programma in programma e ciò dà luogo, laddove le indicazioni non siano chiare ed univoche, ad una condizione di rischio aggiuntiva che deve essere considerata e gestita con maggiore attenzione laddove questo spazio sia in qualche modo sovrapponibile con lo spazio collaborativo.
INAIL in Maker Faire
Maker Faire è una manifestazione dedicata all’innovazione, alla tecnologia e alla creatività che si svolge annualmente a Roma e riunisce innovatori, maker, ricercatori e appassionati da tutta Europa. È un’ambiziosa vetrina di progetti e invenzioni nonché occasione di workshop e conferenze allo scopo di promuovere lo scambio di idee e la cultura della tecnologia. In tale contesto anche Inail partecipa portando in fiera prodotti della ricerca che possano promuovere la cultura della sicurezza soprattutto tra i giovani, più interessati e coinvolti dall’innovazione tecnologica. Quest’anno, tra i prodotti e i progetti sviluppati nell’ambito delle attività di ricerca, Inail ha selezionato un dimostratore di un sistema robotico allo scopo di coinvolgere i visitatori nell’individuazione dello spazio collaborativo e della postazione dell’operatore, una volta assegnata una semplice applicazione.
Laboratorio IV del Dit ha realizzato un sistema che stimolasse la riflessione sui possibili rischi connessi all’interazione con un robot attraverso il riconoscimento dello spazio collaborativo e la comprensione della pertinenza ed appropriatezza dei segnali e dei feedback. Il sistema era costituito da un robot manipolatore a 6 assi completo di pinza di afferraggio ed installato su una base mobile non motorizzata. La base mobile costituiva di fatto il piano di lavoro. Il robot utilizzato poteva implementare tutte le possibili funzioni di sicurezza previste dalla norma EN ISO 10218-2 per sviluppare le operazioni collaborative. Per il dimostratore è stato deciso di utilizzare la funzione di sicurezza Power and Force Limiting: la macchina si arresta se sono superati i valori di forza o pressione individuati dalla norma ISO/TS 15066 derivanti da qualsiasi tipo di contatto. Il braccio è stato alloggiato in un’area dello stand chiaramente delimitata; allo stesso tempo, è stato evidenziato, a terra, lo spazio sicuro destinato all’operatore. Programmato per svolgere l’operazione (prelevare- spostare-depositare) seguendo tre traiettorie diverse, il dimostratore ripeteva l’operazione in sequenza. Delle 3 traiettorie quella corretta era quella in cui la proiezione verticale del sistema robotico ricadeva all’interno del piano della piattaforma mobile, senza invadere lo spazio occupato dall’operatore.

Ai visitatori è stato somministrato un questionario relativo alla percezione dei rischi connessi all’interazione con un sistema robotico collaborativo. Si è cercato di capire il livello di consapevolezza dei pericoli, e conseguenti rischi, che possono caratterizzare l’interazione uomo-robot e se fosse ben chiara la distinzione tra spazio collaborativo, in cui è contemplata la possibilità di interazione, e lo spazio in cui non è previsto che ci possa essere contatto diretto tra l’uomo e la macchina. Il questionario, un sondaggio predisposto su Microsoft Forms e accessibile dai partecipanti tramite la scansione di un Qr-code, è stato svolto da 62 adulti, di cui circa 2/3 studenti (una platea molto giovane quindi) e il restante 1/3 lavoratori. La gran parte, il 63%, non ha mai lavorato con sistemi robotici, come del resto era lecito attendersi, ma ciononostante quasi il 73% dei rispondenti ha detto di sapere cos’è un robot collaborativo, a testimoniare come la diffusione e la relativa conoscenza di queste macchine negli ultimi anni sia cresciuta esponenzialmente. Benché quasi il 90% del campione abbia risposto correttamente alla domanda su cosa si intenda per area collaborativa, è stata rilevata qualche difficoltà nella corretta individuazione della stessa tra le aree evidenziate nel layout del cobot e dei relativi spazi. I dati aggregati di questo sondaggio sembrano dunque evidenziare come a livello generale si percepisca il pericolo connesso all’interazione con un robot, ma nello specifico manchi ancora una concreta informazione sui rischi caratteristici delle applicazioni collaborative e sulla corretta modalità di collaborazione.
Contestualmente, poiché l’evento fieristico Maker Faire è largamente rivolto alle famiglie e vede quindi la partecipazione di tantissimi bambini, si è pensato di porre anche a loro qualche semplice domanda. Su un totale di 34 risposte complessive, la cosa che abbiamo trovato molto interessante è che il 100% dei bambini interrogati ha dichiarato di non aver paura del braccio robotico osservandolo mentre svolgeva l’attività per cui era stato programmato. E circa i 3/4 di essi, alla domanda se un adulto potesse lavorare insieme al robot, ha risposto che poteva farlo a patto di porre attenzione, mentre oltre il 60% ha convenuto che un bambino non potesse mai lavorarci.
Conclusioni e attività future
L’esposizione al pubblico del braccio robotico collaborativo in occasione del “Maker Faire” ha rappresentato per i ricercatori Inail del Laboratorio IV del Dit un’occasione di confronto con chi ha molto interesse in questi sistemi e che probabilmente vedrà, specie per i ragazzi e per i bambini, il suo futuro lavorativo pervaso da sistemi robotici industriali e non (es. robot di servizio). Tutto ciò stimola a proseguire l’attività di ricerca al fine di individuare nuove misure tecniche e procedurali per supportare la definizione dello spazio collaborativo e il suo rispetto durante l’esecuzione delle attività programmate. Considerando l’evoluzione del panorama normativo, è opportuno studiare soluzioni che possano rispondere efficacemente ai nuovi requisiti richiesti dai regolamenti applicabili. A tale fine, un confronto costante con le aziende del settore e le associazioni rappresentative, rappresenta un valore aggiunto imprescindibile. Hanno contribuito alla realizzazione dell’evento i colleghi del Laboratorio IV del Dit ed in particolare il Responsabile Luciano Di Donato, nonché il sig. Luca Cipriani della Sezione 6 del Dit, che ha partecipato alla realizzazione e gestione dei moduli digitali per i questionari.
di Alessandra Ferraro, Luciano Di Donato, Massimo Spagnuolo, Daniela Freda