
Cuscinetti a sezione sottile in viaggio 400 km sopra la Terra
Kaydon ha fornito i suoi cuscinetti obliqui a sfere a sezione sottile per il robot che opererà all’esterno della Stazione Spaziale Internazionale (ISS). I cuscinetti serie Reali-Slim, qui impiegati, assicurano la fluidità di movimento nei giunti del robot con precisione, affidabilità e un design compatto, rivelandosi i componenti ideali per le applicazioni più esigenti dell’industria spaziale.
di Nicole Dahlen
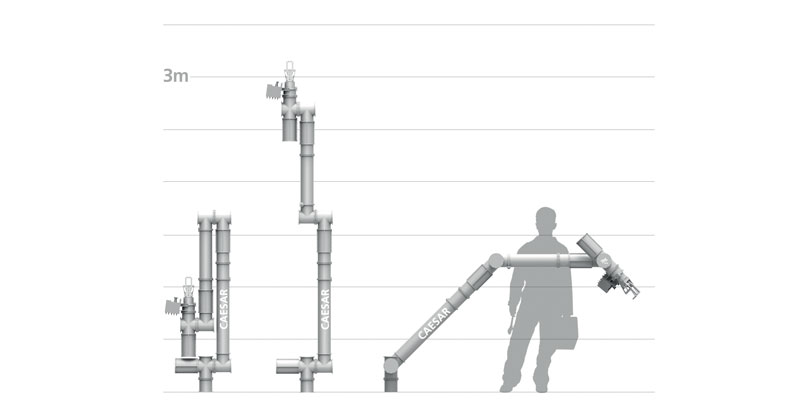
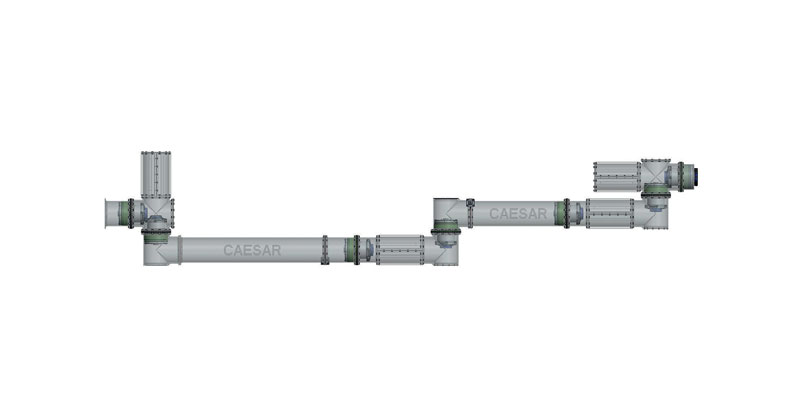
Kaydon ha fornito i suoi cuscinetti a sezione sottile per un robot all’esterno della Stazione Spaziale Internazionale (ISS) a circa 400 chilometri dalla Terra. CAESAR (Compliant Assistance and Exploration SpAce Robot) è dotato di un braccio lungo tre metri e di sette giunti. Il suo compito è quello di occuparsi del funzionamento degli esperimenti scientifici e commerciali in assenza di gravità. Il robot, che pesa 60 chilogrammi, verrà trasportato sull’ISS, a 400 chilometri dalla superficie terrestre, dove verrà installato. Il braccio robotizzato pieghevole ed estremamente mobile si occuperà dei satelliti rotanti o fuori controllo, afferrandoli e stabilizzandoli.
Il Centro aerospaziale tedesco (DLR), sviluppatore di CAESAR, vanta un’eccellente esperienza con i robot nello spazio. Con il progetto ROKVISS (Robotic Components Verification on the ISS), un robot DLR è già stato in funzione sulla ISS dal 2005 al 2010.
I cuscinetti obliqui a sfere a sezione sottile di Kaydon hanno garantito con successo movimenti fluidi nei giunti del robot, grazie all’elevata capacità di carico, all’affidabilità e all’esperienza nelle operazioni spaziali.
Sfruttare le esperienze acquisite con il progetto già realizzato
Per CAESAR i ricercatori hanno potuto attingere alle numerose esperienze fatte con ROKVISS, alcune delle quali controllate dalla Terra. Per esempio, è stata testata la precisione con cui il braccio del robot può essere controllato all’ISS utilizzando un joystick con il cosiddetto force feedback. L’operatore a terra “sente” la forza con cui il robot preme contro il suo obiettivo nello spazio. Il prototipo del braccio del robot spaziale è stato riportato sulla Terra nel 2011 con una capsula Soyuz ed è stato utilizzato dagli scienziati, con i suoi dati sullo stato di usura, come base per la costruzione del nuovo modello.

CAESAR è la continuazione dei sistemi robotizzati a forza e a coppia controllata di DLR e la controparte spaziale degli attuali robot di servizio utilizzati nella produzione e per la cooperazione uomo-robot. La nuova generazione di robot combina elettronica e meccanica in modo innovativo. Il robot ha sette gradi di libertà: questa varietà di movimenti liberamente selezionabili corrisponde a quello del braccio umano, e conferisce una maggiore flessibilità rispetto ai robot standard. La base del robot sviluppato per l’esplorazione e l’assistenza nello spazio è il robot leggero III, che è stato sviluppato dall’Istituto nel 2003 e trasferito al principale produttore mondiale di robot KUKA.
Controllo fluido del movimento e della forza
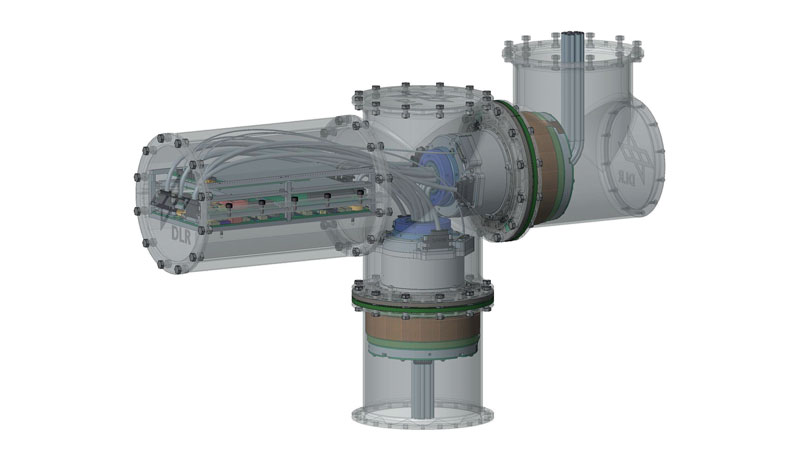
CAESAR può essere azionato in semi-autonomia, da remoto o con telepresenza e force feedback. Il controllo dell’impedenza permette alle articolazioni del braccio di rimanere flessibili e previene danni agli oggetti. Il sistema di sensori di coppia integrato rileva i contatto indesiderati con gli oggetti e consente di reagire in modo appropriato, caratteristica essenziale per la sicurezza, soprattutto quando si lavora con gli astronauti. Poiché non vi è alcun carico gravitazionale nell’ambiente spaziale, tutti i giunti hanno la stessa capacità. Il controllo del movimento e della forza è garantito da sensori di controllo nelle giunzioni e da un bus di comunicazione in tempo reale ad alta velocità che collega le giunzioni all’unità di controllo robot (RCU). Il design del connettore include un albero cavo per consentire il cablaggio interno.
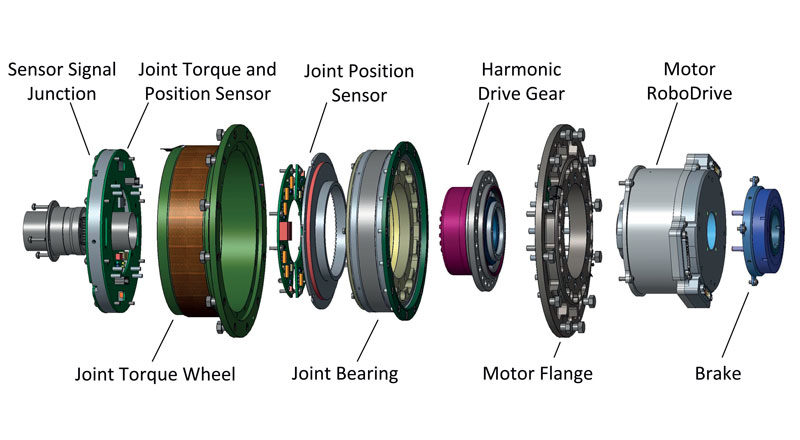
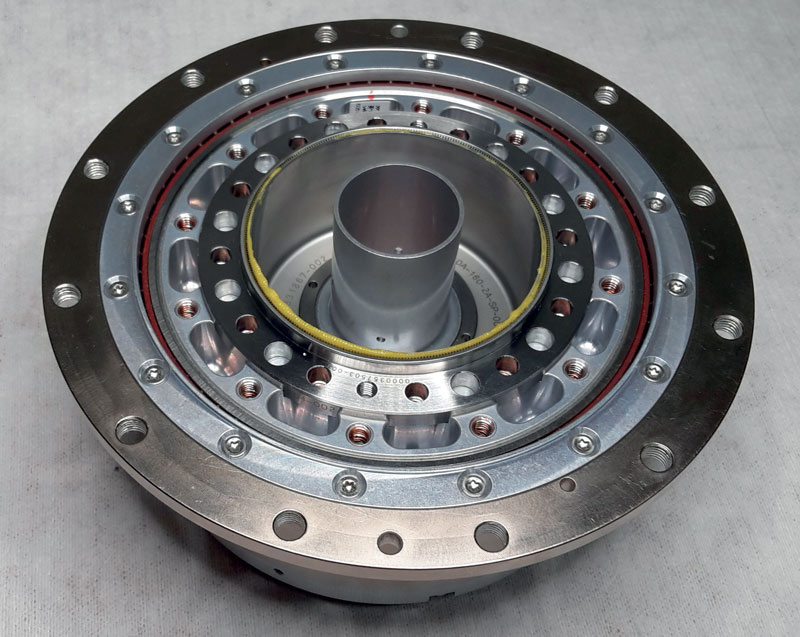
I giunti sono costituiti ciascuno da un motore sincrono con sensore di commutazione, un ingranaggio armonico e cuscinetti a contatto obliquo, il sensore di coppia e un sensore di posizione comune. I cuscinetti obliqui a sfere a sezione sottile di Kaydon sono in grado di assorbire in modo particolarmente efficiente sia le forze radiali, che quelle assiali e di risparmiare spazio.
La serie Reali-Slim, qui utilizzata, è progettata per resistere alle condizioni operative più difficili. Questi cuscinetti offrono un design compatto, elevata precisione e sono ideali per applicazioni esigenti come quella in oggetto.
Ospite permanente in orbita
Poiché la maggior parte dei servizi sarà fornita in futuro per i satelliti geostazionari, la resistenza alle radiazioni e la durata di CAESAR sono calcolate a quindici anni di funzionamento in orbita geostazionaria.
L’intero robot è progettato per temperature comprese tra -20°C e +60°C. Si prevede di costruire questo sistema anche per altri programmi. A tal fine, deve essere possibile adattarlo a vari vettori, satelliti o veicoli spaziali. La produzione e la qualificazione del sistema deve essere efficiente e precisa per raggiungere il successo economico.

Nicole Dahlen è direttore vendite, marketing e organizzazione di Rodriguez, partner di Kaydon nel progetto.